
Use Case
Make tag detection and AR Technologies more accessible by exposing them in a JavaScript-Based Development Environment.
Project consists of multiple Subsystems:
- Web-Based Development Environment to implement Use-Case
- Video Stream of Multiple Cameras to support AR-System
- Tag-Detection provides position data via a websocket
Code is available on DKE GitLab: https://gitlab.dke.univie.ac.at/OMiROB/OmiTagServer
Future Work:
- Finish Web-IDE (Integrate Three.js)
- Develop Use-Case Scenarios
- Implement Custom Scenarios
Projected/Virtual Camera
A Virtual “Projector” is created by using a shader to apply the video texture(s) onto a 3D-Surface.
Scene Camera could then be freely positioned, creating the illusion of a projector/torchlight for each webcam.
Experiment
Results
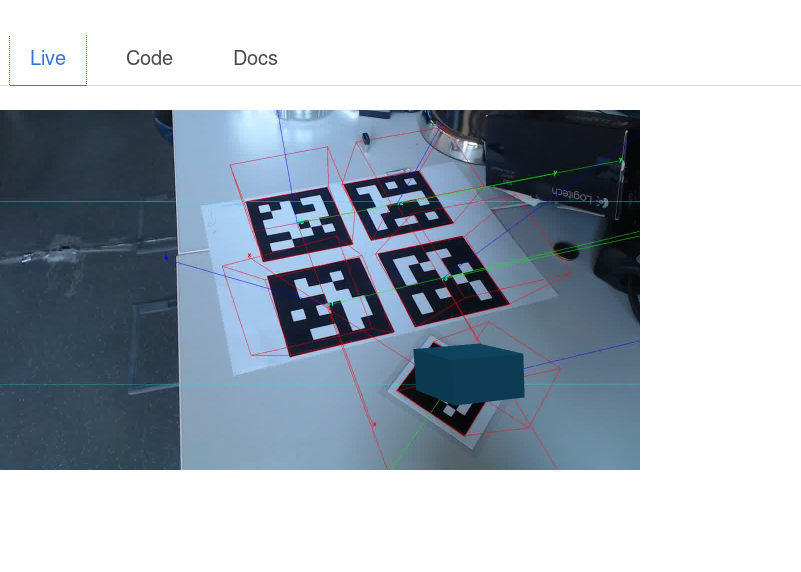
Tag Detection
OmiTag provides local position measurement using printed markers.
Preferred dictionary is ARUCO_MIP_36_H12, which provides a minimum hamming distance of 12 encoded in 36bit marker.
Augmented Reality
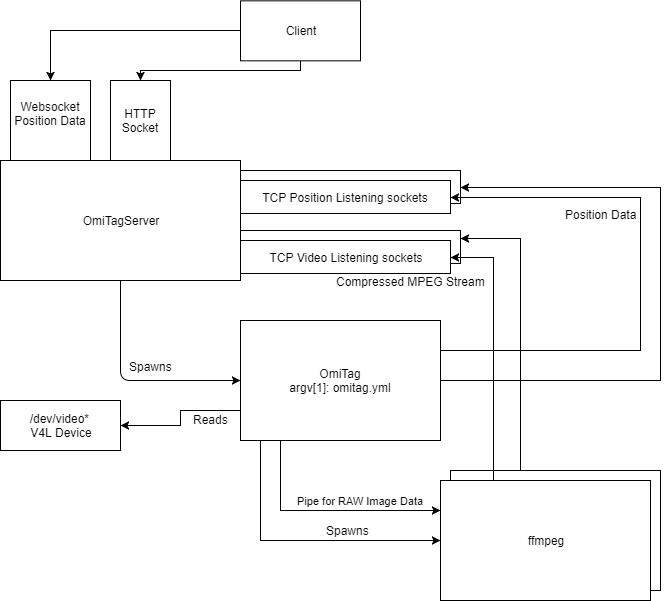
FFMpeg encodes camera stream to MPEG-1, which is served to multiple clients by a java websocket server.
The MPEG-1 Stream is decoded by jsmpeg in the web browser.
3D-Environment
Three.js provides hardware accelerated drawing in a canvas on top of the ffmpeg stream.
Camera Calibration
Print the camera calibration board and run
aruco_calibration live aruco_calibration_board_a4.yml camera_result.yml -size marker_size
Press 'a' to add the visible pattern to the pool of images used for calibration
Press 'c' to perform calibration
Use 's' to start or stop the video capture
Resulting yml file has to be referenced in omitag yml config
Setup: Omitag
Omitag provides video stream processing, detection and calculation of resulting marker coordinates. omitag.yml
%YAML:1.0
posServer: "127.0.0.1:1956"
videoDevice: "/dev/video0"
camParamsFile: "logitech_c920.yml"
markerSize: 0.028
ffmpegCmd: "/opt/ffmpeg/ffmpeg -f rawvideo -pixel_format bgr24 -video_size 1280x720 -framerate 30 -i pipe:0 -f mpegts -c:v mpeg1video -c:a none -b:v 1500k -bf 0 http://localhost:8090/stream/input/1"
headless: 1
xResOut: 1280
xRes: 1920
yRes: 1080
pointsScale: 0.001
points:
- {id: 115, x:95, y:100, z:0}
- {id: 197, x:433, y:95, z:0}
- {id: 23, x:705, y:95, z:0}
- {id: 85, x:95, y:405, z:0}
- {id: 3, x:95, y:605, z:0}
| Name | Description |
|---|---|
posServer | Target system for position data |
videoDevice | V4L Videodevice |
camParamsFile | File containing calibration data from camera calibration step |
markerSize | Width of marker in meters. |
ffmpegCmd | ffmpeg commandline to execute |
headless | 1: avoid using window system |
xResOut/yResout | resolution of images piped to ffmpeg |
xRes/yRes | Camera capture resolution |
pointsScale | Multiplication factor for coordinates. Resulting values are in meters. |
points | Coordinates of ref. tags. |
Setup: OmitagServer
port=8090 publicURL=http://127.0.0.1:8181 omitagCmd1=/path/to/omitag omitag1.yml omitagCmd2=/path/to/omitag omitag2.yml
| Name | Description |
|---|---|
port | Web Service listening port |
omitagCmd[1..9] | omitag commandline |