-
OMiLAB Robotic Arm & Car Experiment 4
Use Case This project is designed to enable the user to remotely play the puzzle towers of hanoi by interacting with a robotic arm. The use case is to solve…
-
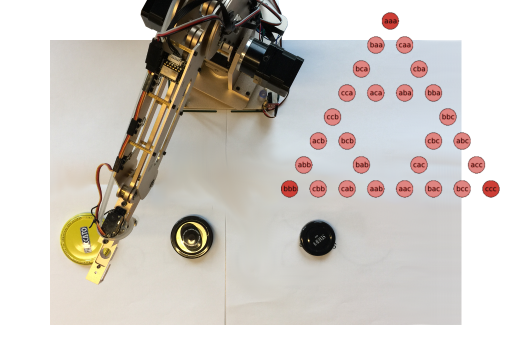
OMiLab Robotic Arm 1
Use Case For the interaction with different objects, knowledge is required about their shape. Automation increasingly employs computational paradigms for interacting with objects. Computational paradigms depend on formal representations of…
-
OMiLab Robotic Arm 2
Use Case Processes in systems of interacting components require more knowledge than the knowledge of each individual component. The trend in computer science suggests that more and more processes will…
-
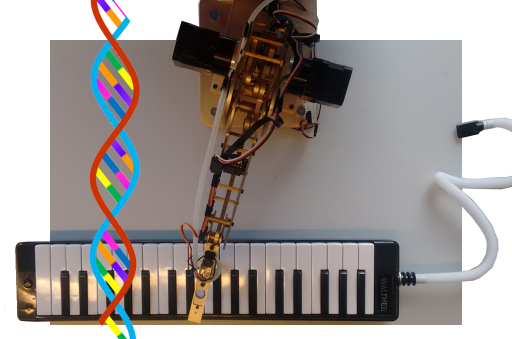
OMiLAB Robotic Arm Experiment 1
Use Case Use Case Description Dobot should be able to play simple songs on the piano. The user should be able to enter a song in the form of a…
-
OMiLAB Robotic Arm Experiment 2
Use Case Use Case Description The goal of this project is to create a method which makes it possible to control a DoBot located in the OMILab with a modelling…
-
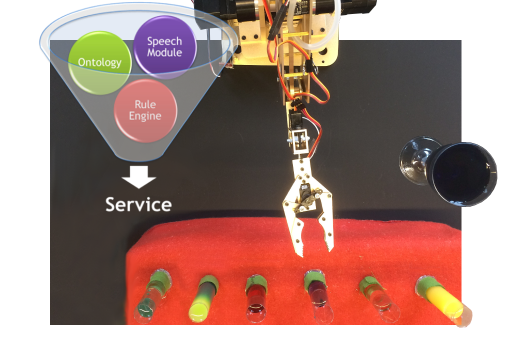
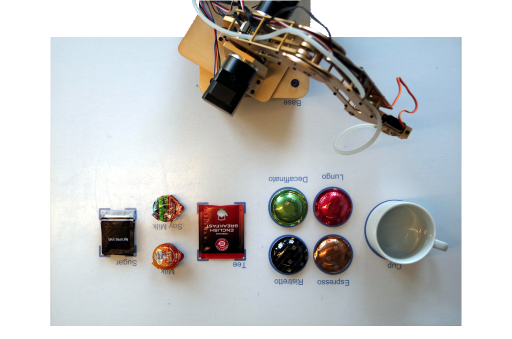
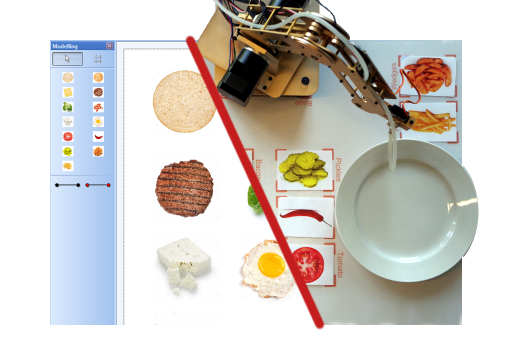
OMiLAB Robotic Arm Experiment 3
Use Case Scenario Mixing a cocktail with a Dobot arm by receiving speech input and subsequently incorporating the required ingredients. Flow of activities Move to ingredient ? grab tube ?…
-
OMiLAB Robotic Car Experiment 1
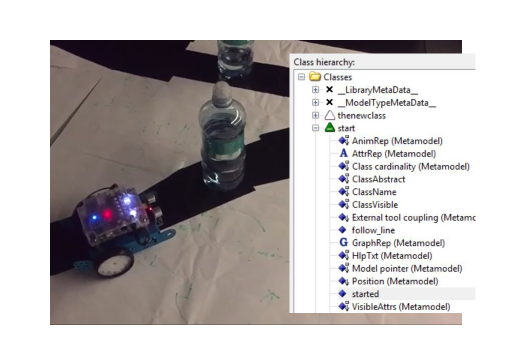
Use Case Use Case Description: Performing a Slalom The makeblock robot car called mbot should follow a black line on the floor till an obstacle appears in front of the…
-
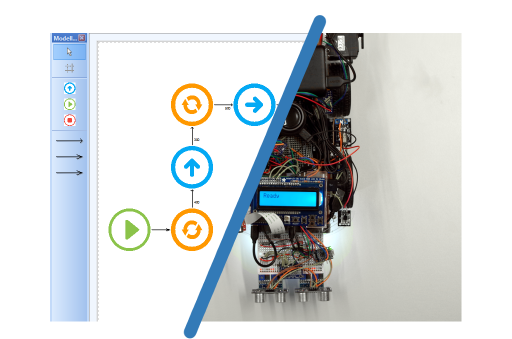
OMiLAB Robotic Car Experiment 2
Use Case To enable autonomous movement of robots, knowledge about its environment is necessary in order to coordinate appropriate movements. Since dynamic environments often lead to imprecise readings of the…
-
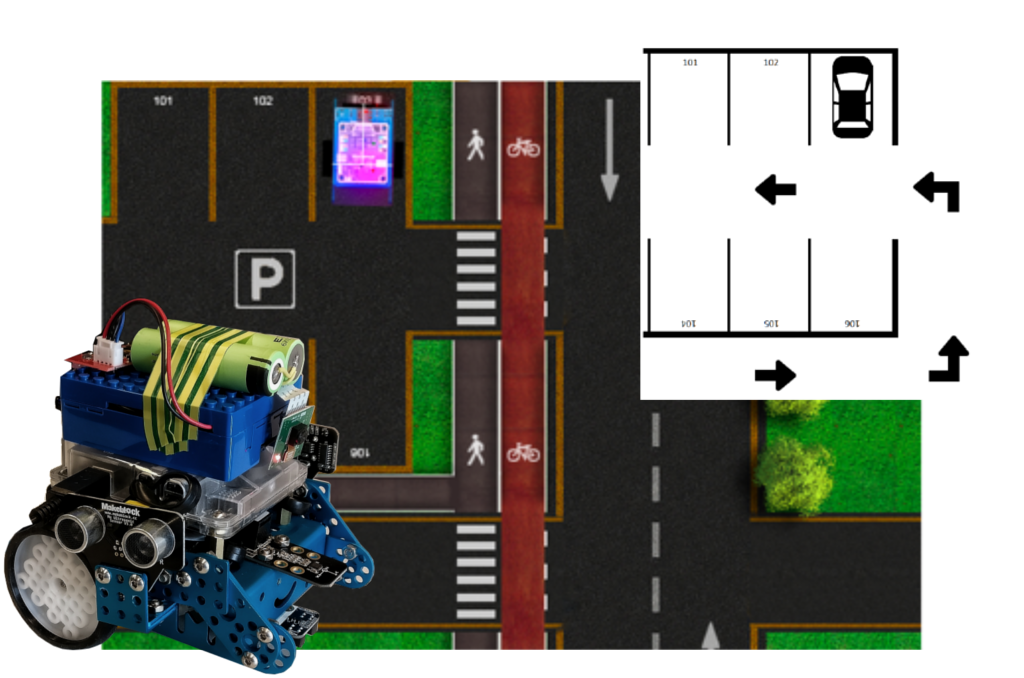
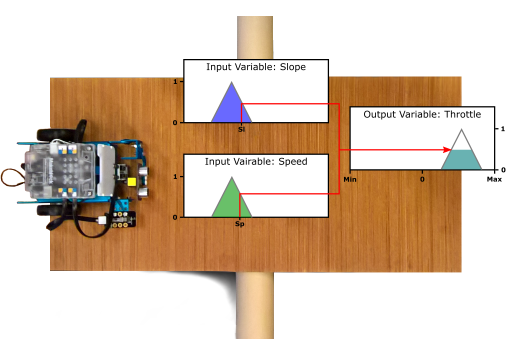
OMiLAB Robotic Car Experiment 3
Use Case The aim of this project is to provide an universal solution for a self-parking mechanism with autonomous parking place discovery. As a prototype vehicle served the Makeblock mBot. The mBot,…
-
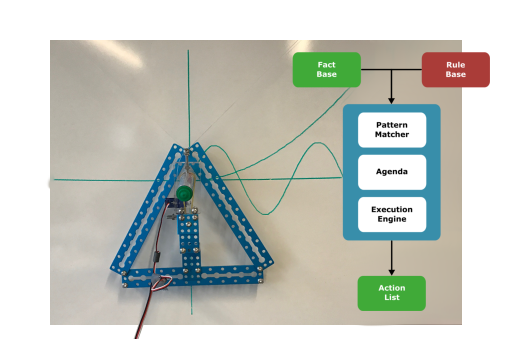
OMiLab Robotic Car PoC 1
Use Case (Karagiannis and Kühn, 2002) Capturing the relevant characteristics of a system with domain-specific (or even case-specific) precision benefits the analysis of existing systems and the creation of new…
-
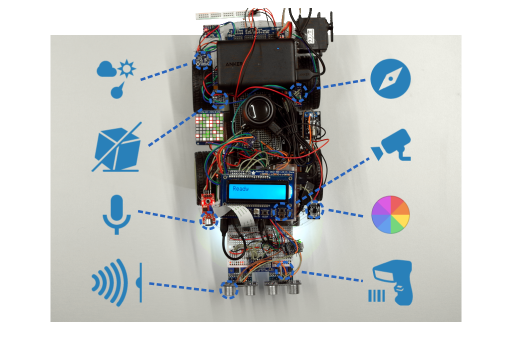
OMiLab Robotic Car PoC 2
Use Case Sensor fusion integrates information from different sensors. In the fusion process, information is produced that is not inherent to the sum of information determined by the individual sensors.…
-
OMiLAB Robotic Spider Experiment 1
Use Case The use case is to create SVG image data and convert it into a drawing using the mSpider bot. The reason for using SVG images, is that they…
-
Personalized Routing and Dynamic Pricing
Use Case The concept of personal routing attempts to deal with a problem which, in today’s world, has so far allowed only little personalization. While personalization already plays a major…
-

Priority queue
Use Case Car sharing services are very common nowadays and are being operated in various cities around the world. In order to further enhance these services and the experience of a…
-
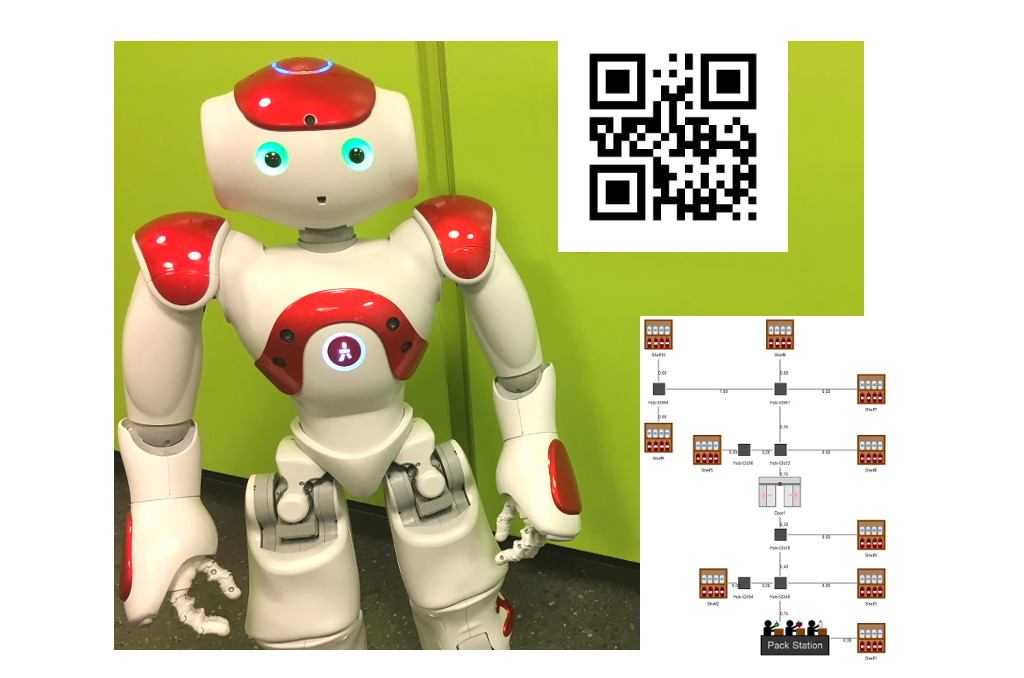
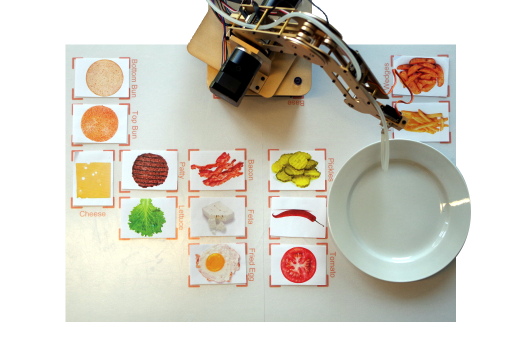
Robotic Order Preparation
Use Case A lot of processes are happening in an online grocery store. Some of them could be partly or even fully automatized. The focus of our OMiRob Case is…
-
Scene2Model Extension
Use Case This project is an extension of the Scene2Model modelling tool. The aim of this project is to automatically provide a list of cars for a specific type of character…
-

Scene2Model Voice Control
Use Case The goal of this project is to modify a model of the Scene2Model application with speech input. The user needs a speech recognition-enabled device (in this case an…
-
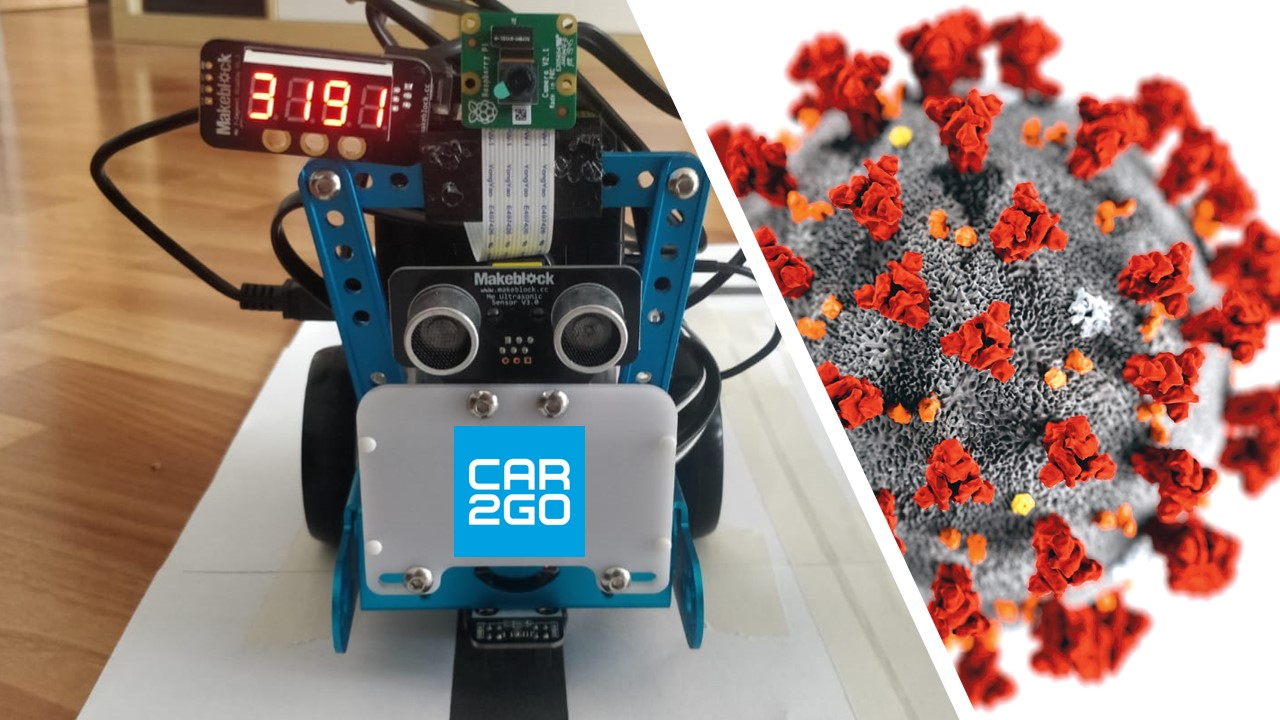
Self-monitoring CPS
Use Case In the chosen use case, the car-sharing provider’s cars can monitor their own state in terms of the viral load on the inside of the car and communicate…
-
Semantic Technologies – G5 – Relocation
Use Case The CPS is driving around virtual Vienna, relocating itself between different Point of Interests (POIs). The overall goal is to intelligently relocate the CPS, to increase the chance…
-
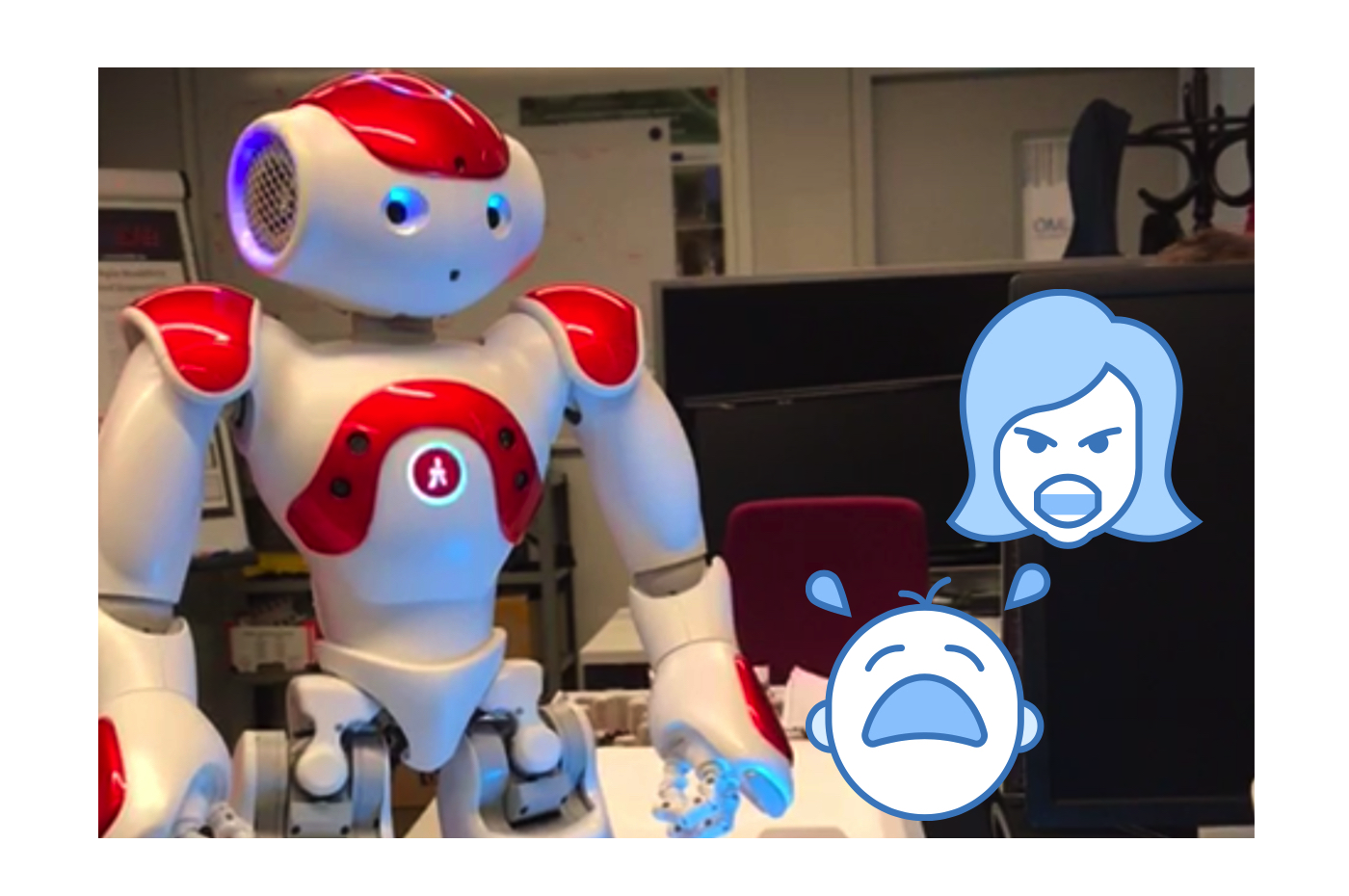
Sentiment analysis with NAO
Use Case In the near future intelligent robot assistants might become reality. Therefore, interactions between humans and computers are becoming more and more common. For robots to live alongside humans…

Experiments
The following experiments are run at the OMiLAB.