
Use Case
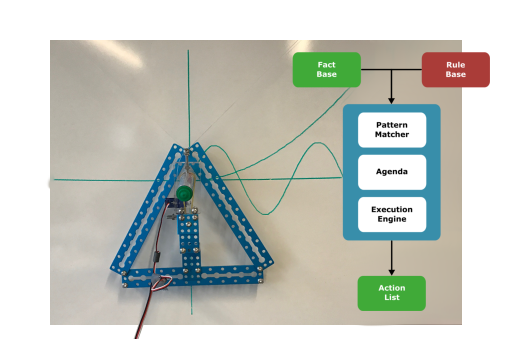
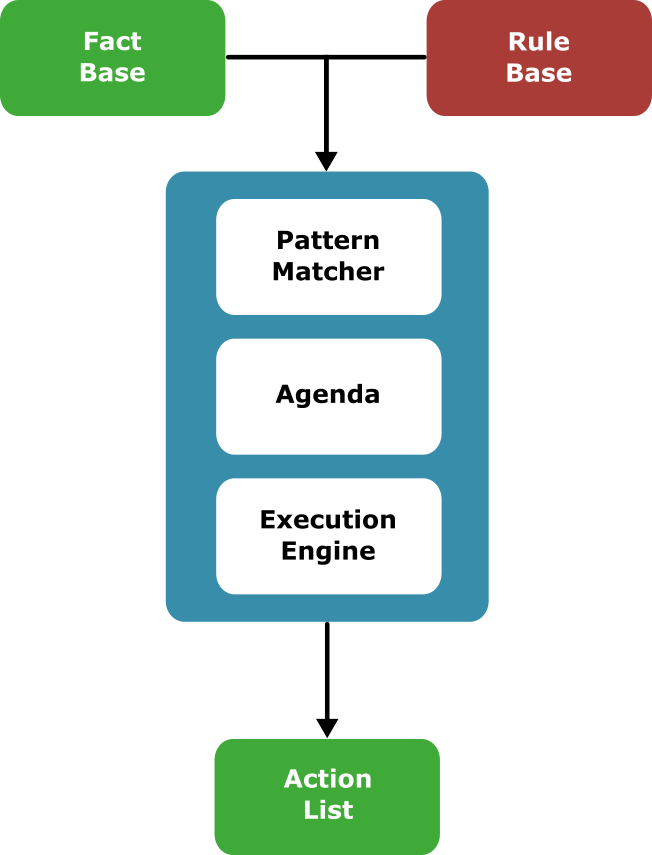
The use case is to create SVG image data and convert it into a drawing using the mSpider bot. The reason for using SVG images, is that they are both human and machine readable through the XML markup language that uses tags. It is easy to understand and edit the SVG file. Further, it is also scalable. The image is processed using a drools rule engine, which sends the commands to the mSpider bot.
Experiment
Tasks
- Build mDrawBot
- Setup and measure mDrawBot
- Analyze firmware
- Develop client Application
- Integrate Drools
- Develop demo Application
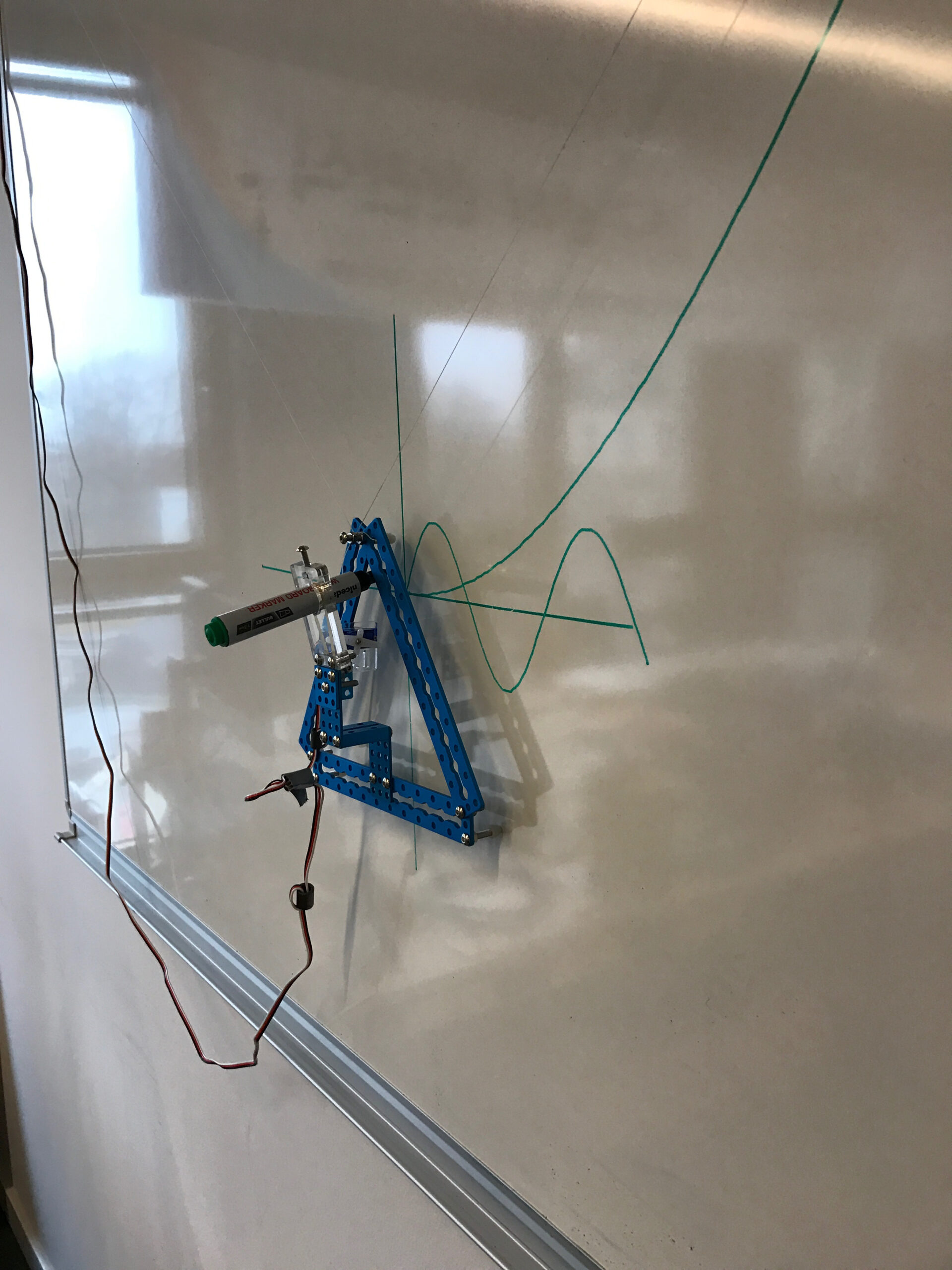
mSpider
- mSpider can draw on wall or white boards
- Two stepper motors control the movement of mSpider
- Robot is controlled by an Arduino compatible mCore module
- Basic move commands available in firmware
The mSpider bot has two strings both with a motor that feeds or pulls in the string. The motors can either turn clockwise or counter clockwise. Using M serial commands the mSpider bot can be configured and the Drawing was created using the G serial commands. These commands are based on a G-code standard.
| Cmd | Name | Parameters |
| X: X-Position Y: Y:Position | ||
| G1 | XY Move | Z: Z-Position (not implemented) A: AuxDelay F: Speed (not implemented) |
| G28 | Home | (none) |
| M1 | Pen | Pen position as int |
| M2 | Pen pos setup | U: Up-Value D: Down-Value |
| M3 | Aux delay | Delay value as int |
| M4 | Laser power | Laser value as int A: Motor A Direction (0/1) B: Motor B Direction (0/1) |
| M5 | Robot setup | W: Distance between Motors H: Vertical Distance to Motors S: Speed (not implemented) |
| M10 | Echo robot setup | Prints current setup |
- Firmware itself is undocumented, but source code is available
- Commands represent a tiny subset of G-code
- Movements are not linear in x/y space
- A Delay of about 2.5s is required after opening serial port for initialisation to succeed.
The lines were not straight over long distances, that is why every line had to be split up into smaller lines of 30mm.
Markup Language
The XML markup language is used. It incorporates Tags such as: “
Results
- Integrates Drools to parse subset of SVG syntax
- Implements line splitting algorithm to make linear x/y movements possible
Video: https://youtu.be/AM5NARLGWqo
Code: https://gitlab.dke.univie.ac.at/OMiROB/mDrawBot